Table Bot
1. State the assignment in your own words.
TableBot was supposed to move around on a flat table, when it reaches an edge, stop, back up, and turn in a direction then keep going. However, with my amazing programming skills, and Nick's amazing engineering skills, we made it so if for example: it going towards the bottom-left corner of the table, it'd brake, go back, and turn right and keep going (second touch sensor not being pushed). If it was going towards the bottom-right corner of the table, it'd brake, go back, and turn left and go forward.
2. What are your input factors? Include the research you did.
We needed the NXT Robot Lego kit for the pieces to build the robot. We also needed to use the computers to program, as well as the LABVIEW software on the computers.
3. Describe the process in detail.
First, we created the program, just to see if we knew what we were doing. Then, we started the structure of the bot, fixing what was wrong, for example: changing the position of the second touch sensor so the bot would be more accurate on its movement.
4. Describe the final output in detail.
Our bot successfully can maneuver throughout the table.
5. Describe feedback you received during the project. How did you use this feedback to correct issues with your project?
We did not receive feedback for this project.
6. What did you learn during the assignment?
We learned how to use the Touch Sensor, and improved on our programming and engineering (structural).
7. If you were to do the project again, what would you do differently and why?
I'd add more weight to the back so that it did not get stuck off the table as much.
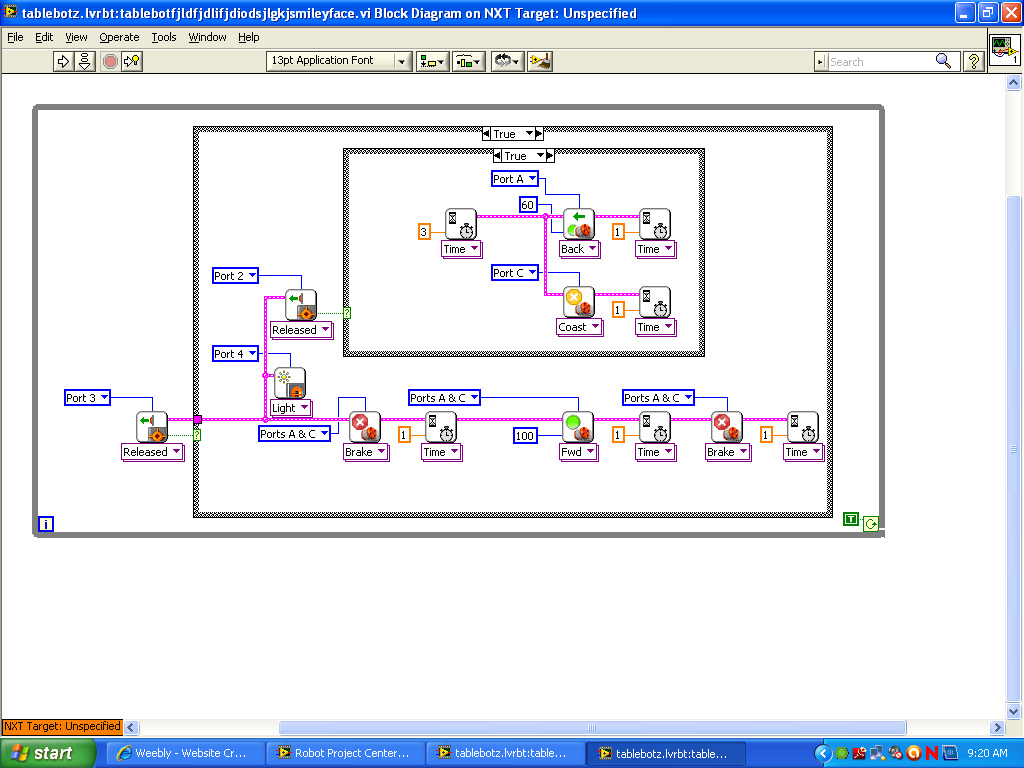
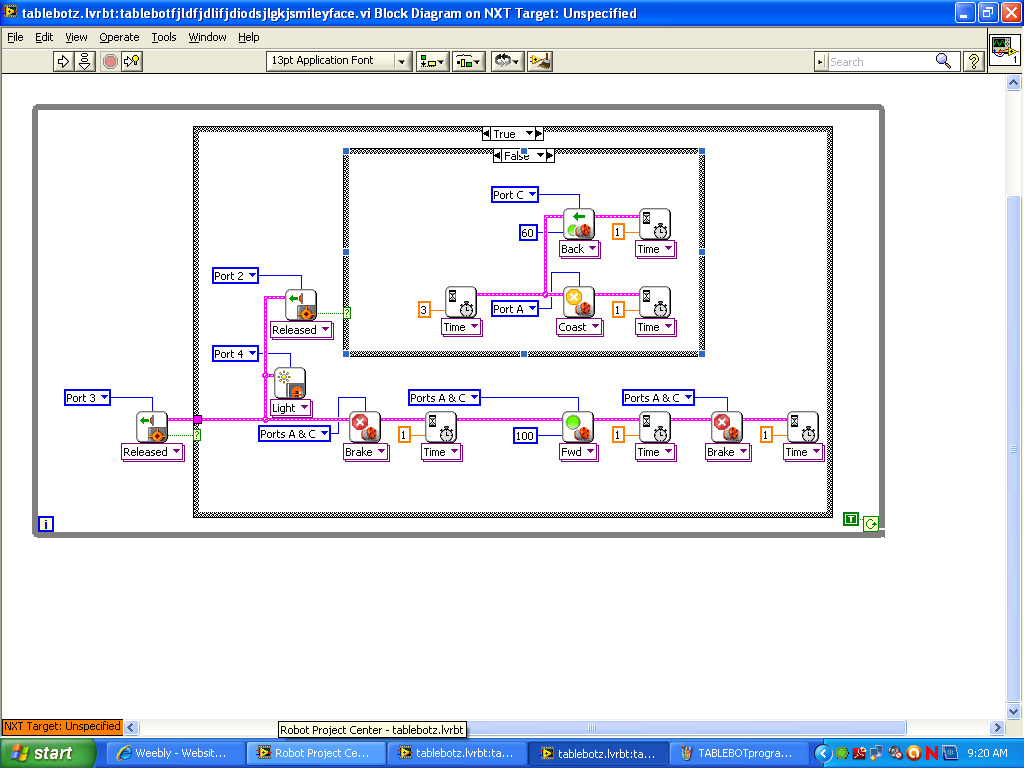
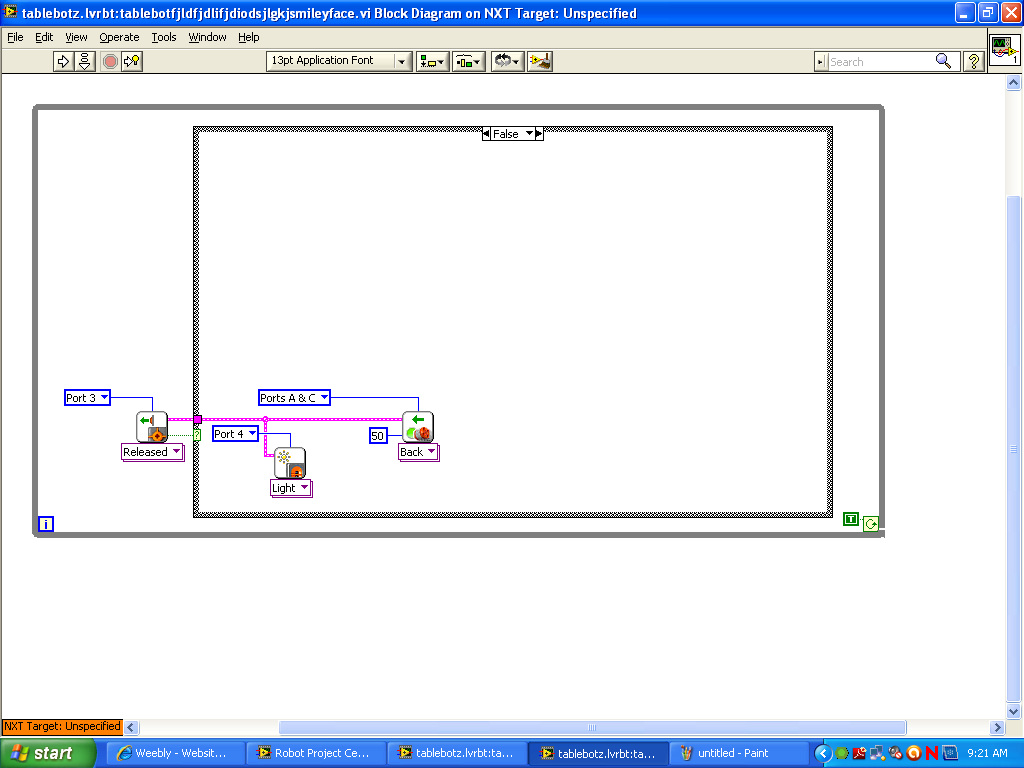
The entire program is encased inside a while loop, so it keeps repeating. If the robot goes off the table (the touch sensor 1), it brakes for one second, then backs up for one second, then brakes again. Also when it goes off the table, the second touch sensor checks if it is on the top left/ bottom right edge of the table or if it is on the bottom left/top right edge, if it is on the topleft/bottomright edge, then it will back up and then turn to the left. It will turn to the right if it is on the bottomleft/top right edge.